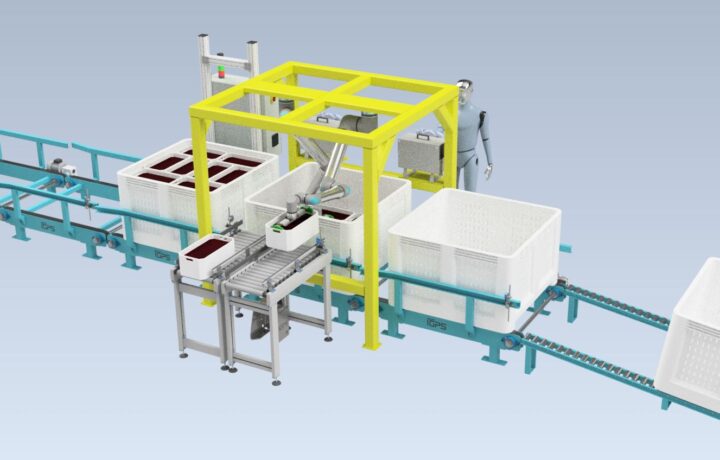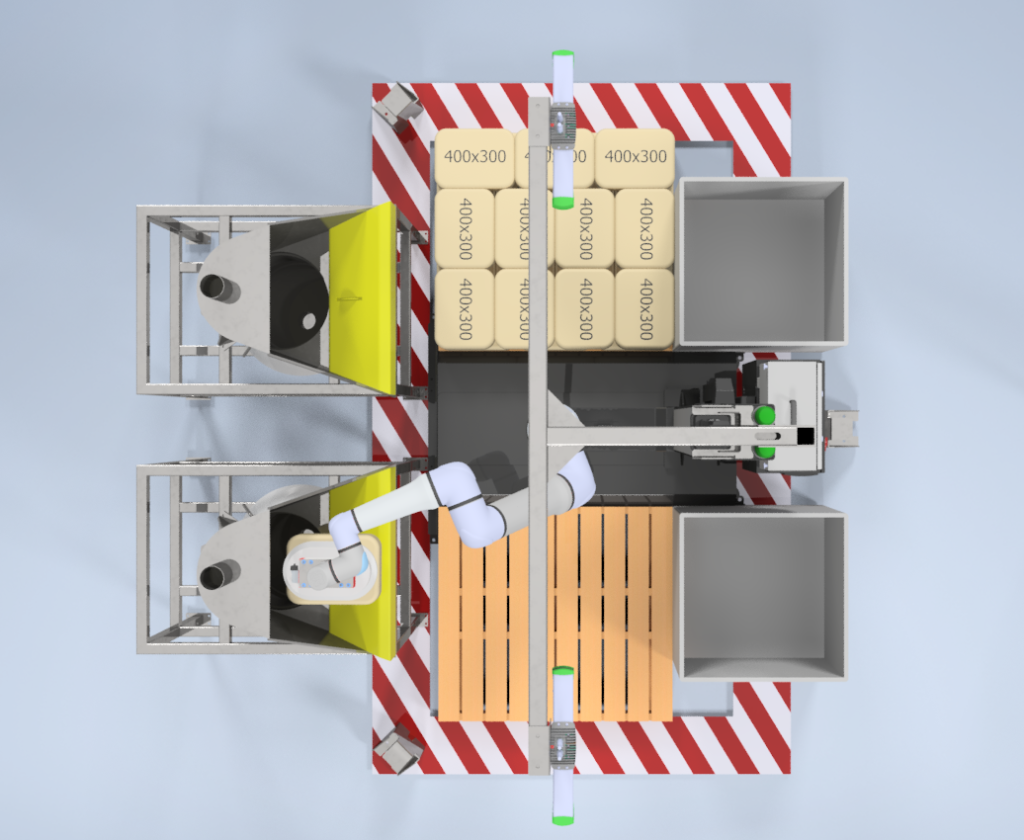
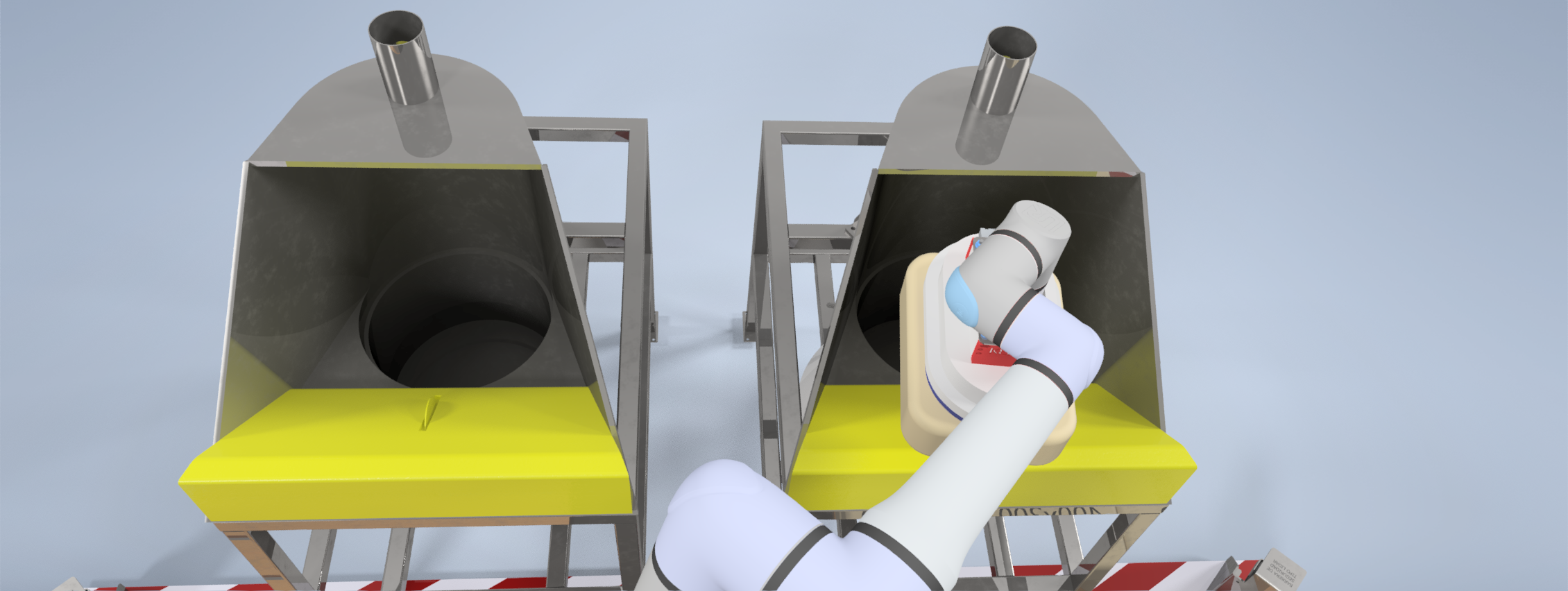
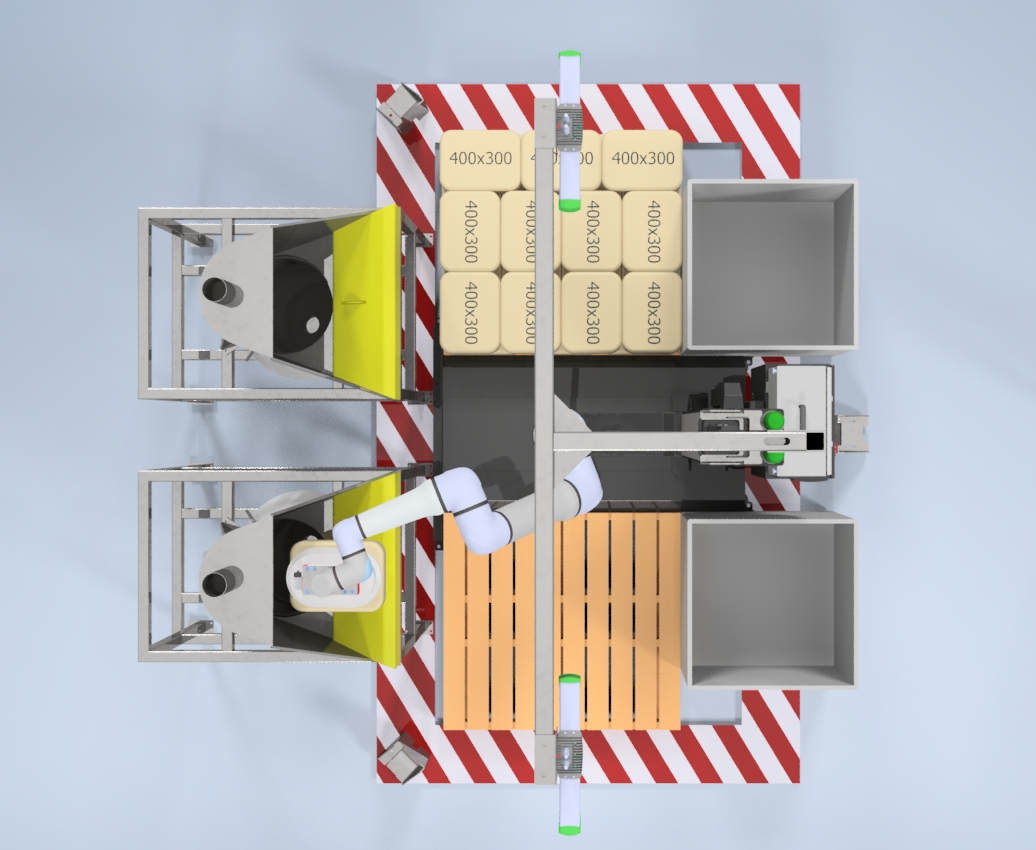
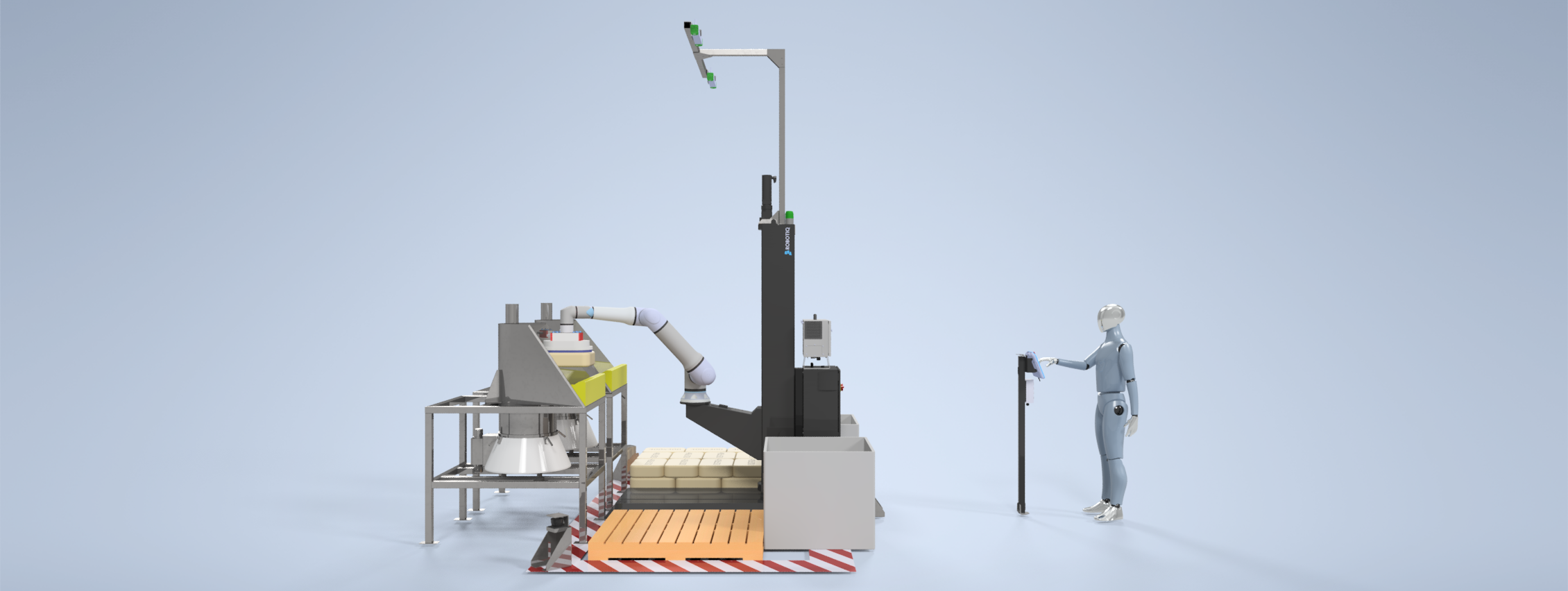
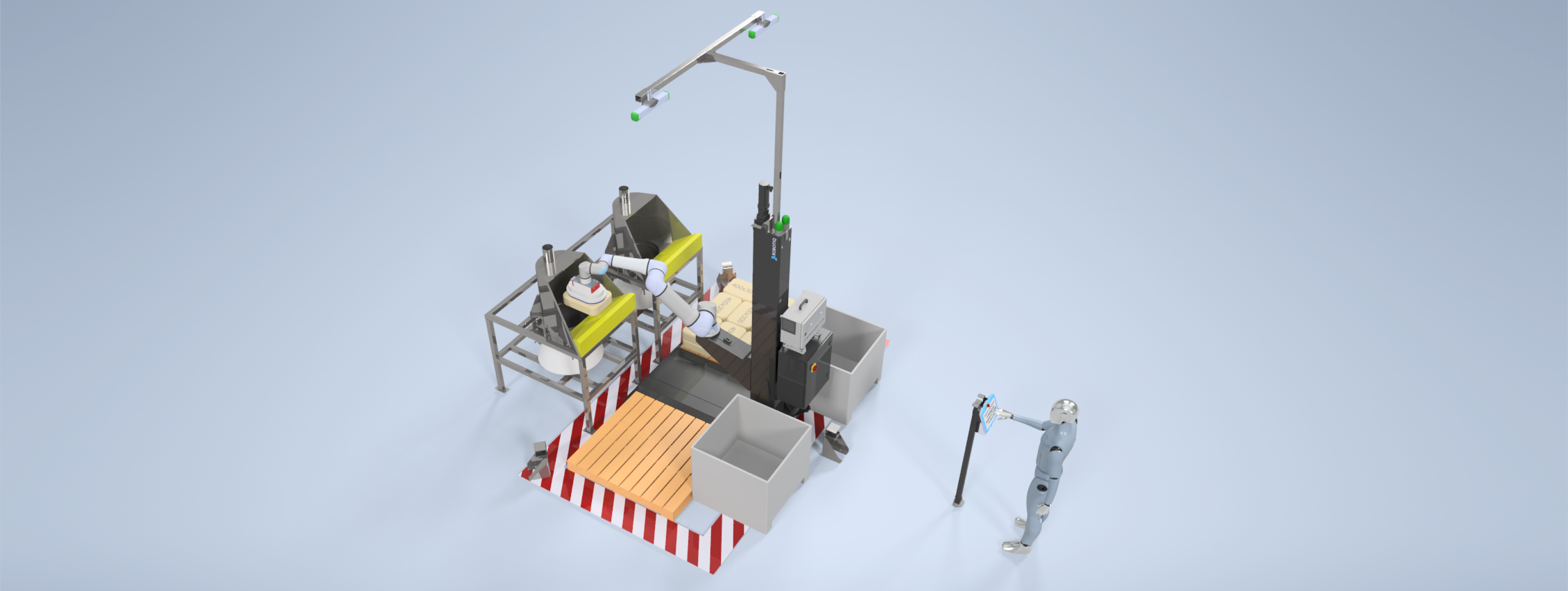
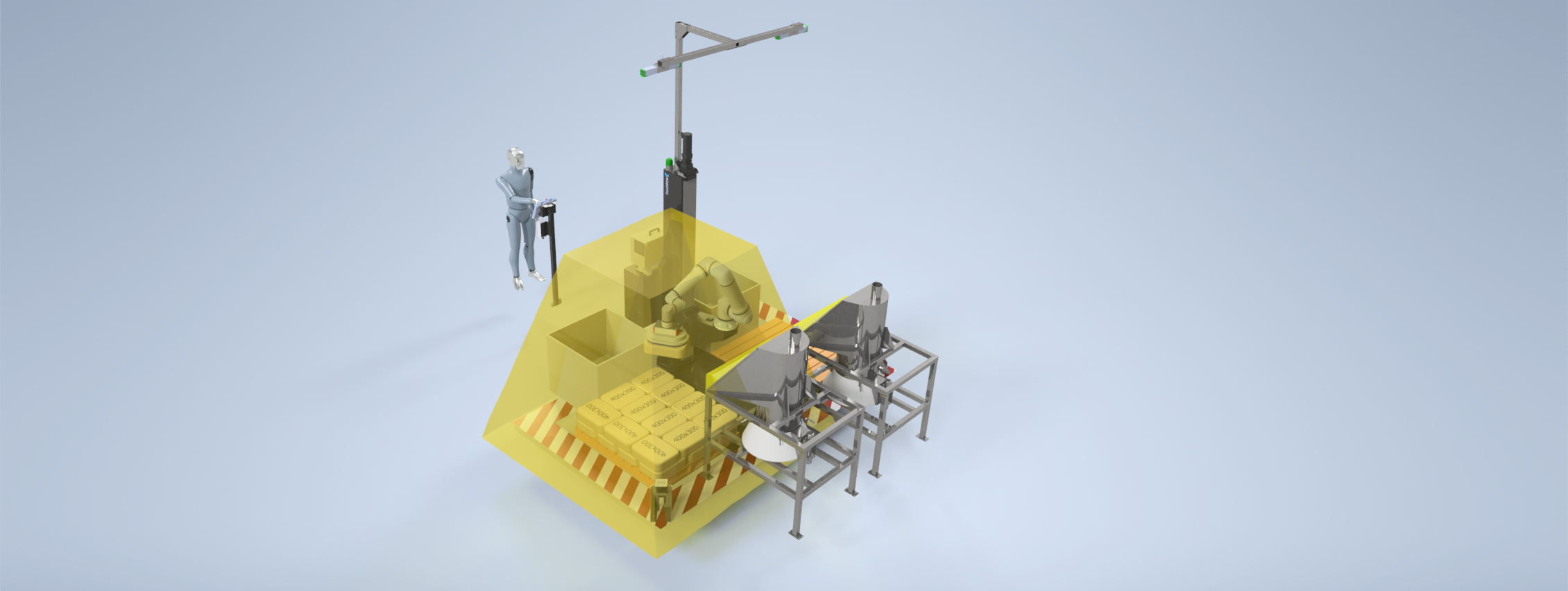
Célula de despaletizado y vaciado de sacos con cobot UR30 y gripper de vacío KSG. Solución robotizada diseñada para automatizar el manejo de sacos pesados y de múltiples materiales en procesos industriales. Equipada con el brazo colaborativo Universal Robots UR30, esta célula utiliza un gripper de vacío KSG (Kenos Sack Gripper) adaptable, con posibilidad de eyectores COAX o conexión a vacío externo. Su diseño flexible permite sellado con espuma para mejorar la sujeción y evitar fugas. Automatiza el despaletizado y vaciado de sacos con eficiencia, precisión y seguridad, reduciendo el esfuerzo manual y aumentando la productividad en entornos exigentes.



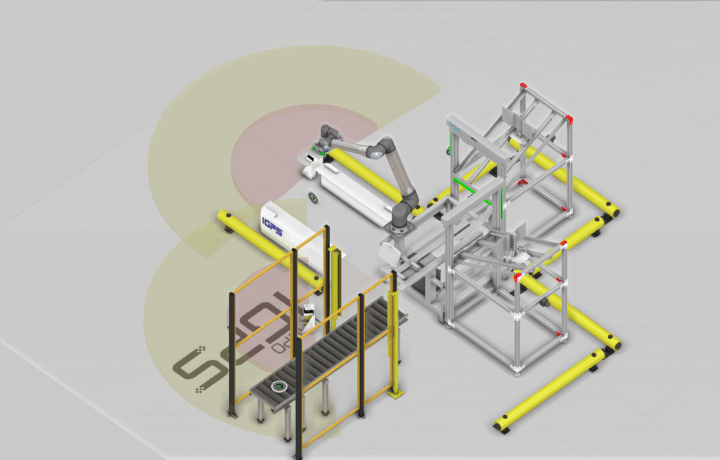
Cobot Armado de Cajas (CAM)
PI_012 CAC Sistema colaborativo para el armado automatizado de cajas muti formato, que integra un cobot UR10e con interfaz intuitiva y capacidades avanzadas de programación. Velocidad hasta 6 Cajas / Minuto (*Dependiendo de Dimensiones)